测量系统经常要用到摄像机和其它传感器,两者间需要同步。本例描述了一个航空摄影系统,它有一台摄像机,包括CCD(电荷耦合器件)图像传感器、 一个惯性测量单元,以及一个GPS(全球定位系统)单元。合成的电路提供触发信号,将测量同步在最佳速率上。GPS提供有关空间位置的信息,惯性测量单元 提供有关空间方位的信息。该单元包括一个陀螺仪、一个磁力计,以及一个加速度计,提供对一个三轴矢量的角度与加速度测量。
图1表示了一个获取航空照片的系统。它包括:四个Atmel区域扫描CCD图像模块,一个线性图像传感器模块,两个Dalsa PCI(外设部件互连)帧捕捉卡,测量单元,一个时钟调节电路,以及一只微控制器。在开发期间,用一台tektronix公司的数字示波器查看触发信号。

用于同步传感器的触发信号是这个测量系统的关键。时钟调节电路向帧捕捉卡发送一个外部触发脉冲,为系统产生触发信号。含有图像传感器的视频模块从帧捕捉卡接收触发信号。每个帧捕捉卡捕获一幅图像,将其存储在板上的存储器中,然后再捕捉下一幅图像。
外部的触发脉冲亦控制传感器、GPS和惯性测量单元。图2表示在台湾云林县麦寮乡上空7000英尺处的一张照片,它使用外部触发电路,完成线性传感器与测量单元的驱动与组合。

电路必须改变外部触发时钟的频率,才能获得最佳的帧率。线性图像传感器模块中的CCD传感器有12288个像素,每个像素的大小为5mm×5mm, 产生的图像约为500线/帧。CCD图像传感器的最大输出速率为320M像素/秒。图像数据通过一个Camera Link接口发送给帧捕捉卡,后者通过PCI总线将图像发送给一台PC。
时钟调节电路产生外部触发时钟脉冲。电路采用了一只Altera公司的CPLD(复杂可编程逻辑器件),用Altera的开发软件仿真触发信号,以及设计电路。时钟调节电路可为系统提供多达15种触发信号频率。
系统的Atmel微控制器带有256字节RAM和用于程序存储的8k字节可编程闪存。微控制器通过一个RS-232接口与PC通信,该接口也可以用 于接收指令,以及报告自己当前的状态。这种握手过程包括生成触发信号的解码与编码参数。微控制器还向数字时序调节电路发送指令;这些指令可改变外部触发器 的脉冲频率。
可以用15种触发频率来调节CCD图像模块的帧速率。外部触发信号亦用于触发测量单元,记录和存储空间参数。图3给出了寻找最佳触发频率的算法。帧速率与触发频率成正比。
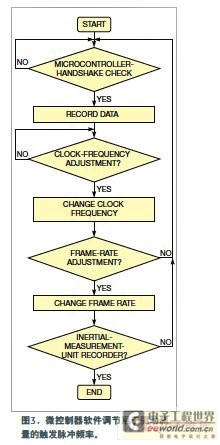
惯性测量单元是系统中的一个关键传感器,在它与帧捕捉卡之间必须有直接的关联。如果外部触发频率为1 kHz,则两个帧捕捉卡中,每个都捕捉1000帧/秒,单元采样速率为1k采样/秒。航空摄影的实验结果表明,该系统成功地同步了所有的传感器。
 在线客服
在线客服
