0 引 言
微机电系统(micro electro mechanical system,MEMS) 陀螺仪已经出现了近二十年⋯ ,与其他陀螺相比,MEMS陀螺在体积、成本、功耗和抗冲击能力等方面都存在很大优 势,但由于早期精度较低,并没有引起重视。近些年,随着微电子加工技术的发展,MEMS惯性传感器特别是陀螺仪 的精度获得大幅度的提高。基于MEMS惯性传感器的惯 性导航系统己成为当今惯性技术领域的一个重要的研究热 点。西北工业大学的苑伟政教授提出了虚拟陀螺的概念, 通过研究同类传感器的相关性来提高其测量精度;东南大 学的吉训生博士,把形态学滤波的思想引入到MEMS陀螺 降噪中,具有一定的理论研究意义 。另外,还有很多学 者提出了新的思路和方法,并仿真取得了一定的效果。但 目前的众多学者的研究多处于理论研究方面,大多集中在 对漂移的离线降噪。
MEMS陀螺仪精度较低的主要原因是输出信号中随机 噪声含量较大,因此,在使用前对陀螺随机误差进行辨识 降噪处理是十分必要的 j。目前常用的陀螺仪随机误差 辨识方法有自回归滑动平均(ARMA)建模法、功率谱密度 分析(PSD)法和Allan方差分析法 。哈尔滨工程大学的 张树侠教授针对激光陀螺和光纤陀螺的特点,分别建立了 ARMA模型 j;东南大学的吉训生在对MEMS陀螺随机 漂移信号建立AR(2)模型后,采用鲁棒性很强的H 滤波 方法,证明了H 滤波效果和实时性比小波变换要好”J。
本文针对实际系统,从陀螺测量模型出发,全面地辨识 出陀螺各误差项,尤其对MEMS陀螺随机噪声进行了建模 和补偿,具有一定的工程实用价值。
1 MEMS捷联惯导系统
MEMS捷联惯导系统由MEMS IMU,信号采集电路,导 航计算机,显示器,数字式电子罗盘HMR3 000,GPS,键盘 和电源等组成。
MEMS惯性测量单元(MEMS IMU)由6只MEMS陀 螺和6只MEMS~I]速度计组成。MEMS捷联惯导系统框图如图l。

2 MEMS陀螺测量模型
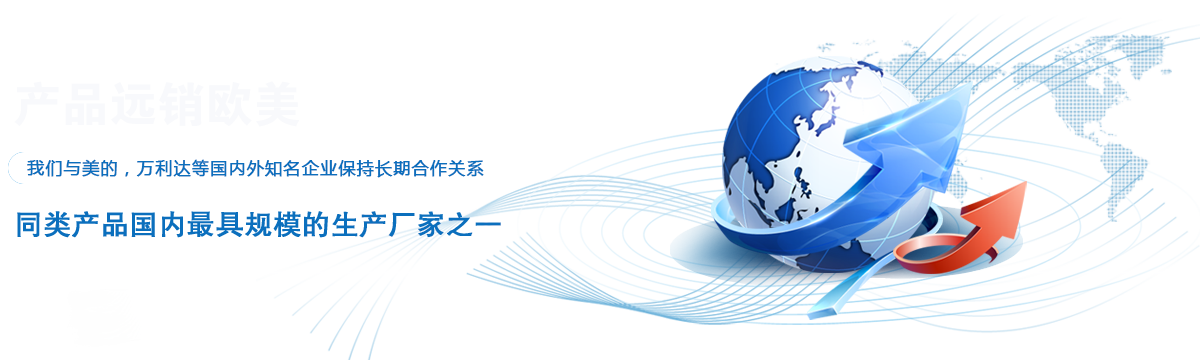
MEMS陀螺测量模型为
其中,零偏和刻度因数误差称为确定性误差,可以通过 有效的标定方法进行一定精度的补偿,而随机误差是陀螺 误差辨识的难点。
3 确定性误差辨识与补偿
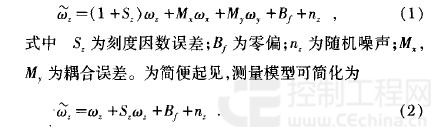
将系统置于三轴转台上,通过速率实验和多位置实验 可以容易地确定陀螺的确定性误差项 ,各参数可以直接 装订到程序中。各误差项如表1所示。
4 随机误差辨识与补偿
在完成确定性误差的补偿后,本文应用ARMA对随机 时间序列建模,实验时首先将3周状态调平,将系统安装 后,预热20rain,然后,以2 kHz频率采集数据30rain,信号 如图2所示。
下面分以下几个步骤进行随机误差的辨识和补偿:
1)信号的正态性和平稳性检验
信号的正态性可以通过计算信号的偏度和陡度来确 定,也就是三阶矩和四阶矩。如果三阶矩接近0,四阶矩接 近3www.cechina.cn,则认为信号时正态的。通过计算三轴陀螺的三阶矩 分别为-0.053 2,一0.130 0和一O.096 6,四阶矩分别为 3.0166,2.9128和2.931 8CONTROL ENGINEERING China版权所有,满足正态性条件,采用游程法 验证信号同时满足平稳性条件。
2)模型确定
ARMA,AR和MA模型之间的差别可以从它们的自相关函数和偏相关函数特性上反映出来,通过对样本序列自 相关函数和偏相关函数的分析就可以判断模型的类型,图 3和图4分别给出三轴陀螺的自相关函数和偏相关函数。 从图3和图4可以看出:陀螺信号自相关函数变化缓慢,具 有长时间的相关性,即自相关函数存在“拖尾”,而其偏相 关函数变化快速,具有“截尾”特性。因此,陀螺漂移信号 的模型可以用AR模型来描述。
 在线客服
在线客服
