

MEMS陀螺仪误差辨识与补偿(2)

3)模型阶次的确定
从上面的分析已经可以确定漂移模型的形式,但为了确定模型的阶数,还得借助PPE准则或者AIC准则,寻找 使PPE准则或者AIC准则取最小值的模型,确定最适合的 模型和阶次,以 陀螺为例,表2给出所有适合的模型系数 AIC的值。

从表2中可以看出:AIC值差别不大,从工程实用的角 度,选择AR(1)模型作为陀螺随机漂移的模型。
4)建立随机误差的系统方程
陀螺漂移是一个随机平稳过程,根据上面的分析,对X 陀螺用AR(1)模型来描述

(3) 其中, (k)是漂移模型的状态,W(k)是均值为零,方差 为0.6185(由实际数据计算)的白噪声,从系统的观点出 发,认为漂移是以白噪声为输入的系统的输出。
其中,∞ 为陀螺角速率;q 为AR模型对应的随机漂 移部分。系统的观测值Y(k)可以表示为状态量加上观测 噪声lCONTROL ENGINEERING China版权所有,(k),/.p(k)是均值为0,方差为2.952 7的白噪声,卡 尔曼滤波的观测方程为

其中,∞ 为陀螺角速率;q 为AR模型对应的随机漂 移部分。系统的观测值Y(k)可以表示为状态量加上观测 噪声lCONTROL ENGINEERING China版权所有,(k),/.p(k)是均值为0,方差为2.952 7的白噪声,卡 尔曼滤波的观测方程为
为了更进一步说明方法的正确性,将系统放置在三轴 转台上,以l0。/s的角速率转动,采集数据30 S,采样频率为 2OHzCONTROL ENGINEERING China版权所有,对实验数据进行分析,滤波结果如图7所示,可以看 出:在动态下具有和静态下一致的效果。
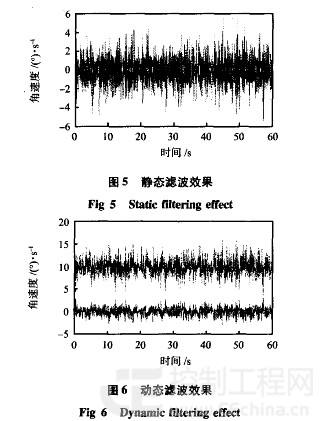
经计算,滤波前的测量数据方差为0.422 1,滤波后估 计值的方差为0.1324,为滤波前的31.35% ,滤波效果明 显,它可以满足实时性的要求。
5 结论
通过对自研的MEMS捷联惯导系统的研究,分别对 MEMS陀螺的确定性误差和随机误差进行了辨识和补偿, 通过建立随机误差的AR模型,采用卡尔曼滤波进行了补 偿,并在动态下进行了验证,无论静态还是动态下,补偿后 的信号方差优于补偿前的3O% ,说明了建模方法正确,滤 波效果明显,具有一定的工程应用价值。 ’ ·
参考文献:
[1] 李荣冰,刘建业.基于MEMS技术的微型惯性导航系统的发 展现状[J].中国惯性技术学报,2004(6):88-94.
[2] 吉训生,王寿荣.MEMS陀螺仪随机漂移误差研究[J].宇航 学报,2006,27(4):640—642.
[3] Shkel A M.Type I and Type II micro machined vibratory gym— scope[c]∥Proceeding of Position。Location and Navigation Sys— tern,2006.
[4] 杨叔子,吴雅.时间序列分析的工程应用[M].武汉:华中 理工大学出版社,1996.
[5] 张树侠.激光陀螺漂移的数据建模和滤波[J].中国惯性技术 学报,1999,17(4):70-72.
[6] 张树侠,闫威.激光陀螺漂移的数据建模和滤波[J].中国 惯性技术学报,1999,7(4):21-25.
[7] 吉训生,王寿荣,许宜申.自适应Ka|man滤波在MEMS陀螺 仪信号处理中的应用[J].传感器与微系统,2006,25(9): 79—82.
来看看其他人说了些什么?-----------------------------------------------------------------> 进入详细评论页