

如何选择陀螺仪(2)

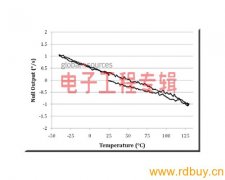
图1. 经历温度循环(–45℃至+130℃)时未补偿ADXRS453的零点偏置输出
如果应用允许启动时复位零点偏置(即无旋转时启动),或者在现场将零点偏置调零,则可以忽略此误差。否则,这就可能是偏置稳定度性能的一个限制因素,因为我们无法控制运输或存储条件。
抗振
理想情况下,陀螺仪仅测量旋转速率,无关其他。但实际应用中,由于机械设计不对称和/或微加工不够精确,所有陀螺仪都有一定的加速度敏感度。事实上,加速度敏感度有多种
外在表现,其严重程度因设计而异。最显著的通常是对线性加速度的敏感度(或g敏感度)和对振动校正的敏感度(或g2敏感度)。由于多数陀螺仪应用所处的设备是绕地球的1 g重力场运动和/或在其中旋转,因此对加速度的敏感度常常是最大的误差源。
成本极低的陀螺仪一般采用极其简单紧凑的机械系统设计,抗振性能未经优化(它优化的是成本),因而振动可能会造成严重影响。1000°/h/g(或0.3°/s/g)以上的g敏感度也不足为奇,比高性能陀螺仪差10倍以上!对于这种陀螺仪,偏置稳定度的好坏并无多大意义,陀螺仪在地球的重力场中稍有旋转,就会因为g和g2敏感度而产生巨大的误差。一般而言,此类陀螺仪不规定振动敏感度——默认为非常大。
较高性能的MEMS陀螺仪则好得多。表1列出了几款高性能MEMS陀螺仪的数据手册所列规格。对于这一类别中的多数陀螺仪,g敏感度为360°/h/g(或0.1°/s/g),某些低于60°/h/g,远远优于极低成本的陀螺仪。但是,对于小到150 mg(相当于8.6°倾斜)的加速度变化,即使其中最好的陀螺仪也会超出其额定偏置稳定度。

表1
有些设计师试图利用外部加速度计来补偿g敏感度(通常是在IMU应用中,因为所需的加速度计已经存在),这在某些情况下确实可以改善性能。然而,由于多种原因,g敏感度补偿无法获得完全的成功。大多数陀螺仪的g敏感度会随振动频率变化而变化。图2显示了Silicon Sensing CRG20-01陀螺仪对振动的响应。注意,虽然陀螺仪的敏感度在额定规格范围内(在一些特定频率处略有超出,但这些可能不重要),但从DC到100 Hz,其变化率为12:1,因此无法简单地通过测量DC时的敏感度来执行校准。确实,补偿方案将非常复杂,要求根据频率改变敏感度。

来看看其他人说了些什么?-----------------------------------------------------------------> 进入详细评论页