

201301/29
如何选择陀螺仪(5)
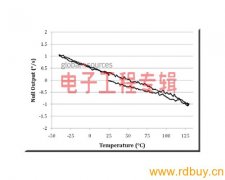
表2. 多种陀螺仪(未经补偿)在不同振动情况下的估计误差(°/s)

表3. 采用g敏感度补偿的多种陀螺仪(g敏感度改善5倍)在不同振动情况下的估计误差(°/s)
选型新范式
在误差预算中,偏置稳定度是最小的分量之一,因此选择陀螺仪时,更为合理的做法是考虑将最大误差源最小化。在大多数应用中,振动敏感度是最大的误差源。然而,有时用户可能仍然希望获得比所选陀螺仪更低的噪声或更好的偏置稳定度。幸运的是,我们有办法来解决这一问题,那就是求平均值。
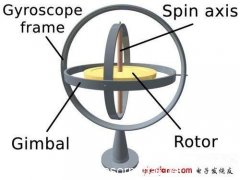
不同于设计相关的环境或振动误差,多数陀螺仪的偏置稳定度误差具有噪声特性。也就是说,不同器件的偏置稳定度是不相关的。因此,我们可以通过求取多个器件的平均值来改善偏置稳定度性能。如果对n个器件求平均值,则期望的改善幅度为√n。宽带噪声也可以通过类似的求平均值方法予以改善。
结束语
长久以来,偏置稳定度被视为陀螺仪规格的绝对标准,但在实际应用中,振动敏感度常常是限制性能的更严重因素。根据抗振能力选择陀螺仪是合理的,因为其它参数可以轻松地通过校准或对多个传感器求平均值来改善。
作者:Harvey Weinberg
ADI公司MEMS和传感器技术部应用工程组主管
来看看其他人说了些什么?-----------------------------------------------------------------> 进入详细评论页